|
|
 |
|
 |
|
О воздушном транспорте
Категория: Новости |
Новость от: admin |
22-12-2017
Атбашьян Дмитрий Александрович, E-mail: skynav@mail.ru
Введение.
Важнейшее качество воздушного транспорта – быстрота перевозок, зависит не только от скорости полета на маршруте, но и от затрат времени на доставку пассажиров, или грузов на аэродром и с аэродрома, рулежку по аэродрому к месту старта и др. Ход развития авиации, рост скорости и дальности полета самолетов, рост взлетно-посадочных скоростей, рост веса самолетов и мощности их двигателей – все это ведет, с одной стороны, к увеличению размеров аэродромов, с другой стороны, к их удалению все дальше от крупных населенных пунктов. От этого страдает оперативность авиационных перевозок, уменьшается их средне-путевая скорость. В результате, увеличение крейсерских скоростей полета самолетов вдвое, приводит, на практике, к повышению средне-путевой скорости лишь на 10 – 15%
Сокращению взлетно-посадочных скоростей и дистанций, поэтому, всегда придавалось и придается большое значение. Значительно возросшая степень механизации крыла, ускорители взлета и тормозные приспособления после посадки – все это дает значительное улучшение взлетно-посадочных характеристик самолетов, однако не может полностью удовлетворять существующим требованиям.
Вертолеты, широко используемые в настоящее время, в силу особенностей аэродинамической схемы, дороги в эксплуатации, имеют ограниченные крейсерские скорости полета и не обеспечивают высокие средне путевые скорости на средних и больших дальностях полета.
Радикально изменить положение могут самолеты с вертикальным взлетом и посадкой (СВВП), которые сочетают в себе скоростные свойства самолетов с вертикальным взлетом и посадкой вертолетов. Если провести анализ значений средне путевых скоростей вертолета, самолета и СВВП, в зависимости от дальности полета, с учетом непроизводительных потерь времени, (самолет – 3 часа, вертолет и СВВП – 1 час), то наибольшие средне путевые скорости, на дальности до 100 км. обеспечивают вертолеты или СВВП, на дальностях 200 – 2000 км – СВВП, и только на дальностях свыше 2000 – 4000 км. использование самолетов становится эффективным наряду со скоростями СВВП. Если учесть, что основной объем воздушных перевозок имеет место на линиях протяженностью 300 – 1000 км., становится ясной актуальность создания СВВП с такой дальностью полета.
Вертикальный взлет СВВП осуществляется либо с помощью специальных подъемных двигателей, которые в полете по маршруту не работают и являются, таким образом, «мертвым» грузом, либо с помощью изменения направления вектора тяги основных двигателей. При этом суммарная энерговооруженность СВВП должна быть более 1 (тяговооруженность Т кг / вес СВВП G кг > 1) для обеспечения вертикального взлета, а это приводит к малой, по сравнению с самолетами весовой отдаче и экономичности СВВП. Правда, в весе конструкции СВВП возможна экономия за счет веса отдельных его агрегатов и узлов: крыло его может быть рассчитано не из условия взлета и посадки, как у самолета обычной схемы, а из условия дальности полета и маневренности на различных высотах и переходных режимах, а это позволяет уменьшить его площадь и вес. Значительно меньшие взлетно-посадочные нагрузки позволяют облегчить конструкцию и снизить вес шасси. Возможность посадки на ограниченные площадки позволяет уменьшить вес навигационного запаса топлива.
Однако, указанные возможности лишь частично компенсируют вес необходимых для СВВП устройств.
Многие страны располагают широкой сетью аэродромов местных воздушных линий с грунтовыми и бетонированными взлетными полосами длиной 600 – 1200 м. С этих аэродромов эксплуатируются самолеты с полетным весом до 50 – 55 т, которые имеют крейсерские скорости полета 300 – 500 км/час, морально устарели и нуждаются в замене более скоростными, грузоподъёмными и экономичными самолетами.
Им может стать СКВП – самолет с коротким взлетом и посадкой, в котором, ценой отказа от вертикального взлета и посадки, можно обойти недостатки СВВП и достигнуть экономичности существующих скоростных самолетов. Короткий разбег и пробег при взлете – посадке СКВП получается не только за счет использования мощной механизации крыла, но и отклонения вектора тяги маршевых двигателей на некоторый расчетный угол к горизонтали, однако меньший, чем 90 градусов.
Вес механизма поворота вектора тяги с избытком компенсируется за счет веса других частей СКВП (шасси, крыла) и, особенно, за счет веса навигационного запаса горючего. Если аэродромы для самолетов с ТРД с грузоподъемностью, например, до 10 т. расположены в 600 – 1000 км. друг от друга, то аэродромы, пригодные для СКВП той же грузоподъемности имеются в 2 – 3 раза ближе. По существующим в ГА условиям, каждый самолет при вылете должен иметь запас горючего до аэропорта назначения плюс топливо для полета до запасного аэродрома и еще на 30 мин. полета. Таким образом, малые расстояния до запасных аэродромов дают СКВП значительное преимущество перед самолетами обычной схемы.
В настоящее время известны три направления в сокращении взлетной и посадочной дистанций:
- увеличением подъемной силы крыла в процессе взлета и посадки;
- увеличением ускорения самолета на разбеге и торможения на пробеге;
- приложением силы тяги силовой установки в направлении, обеспечивающем появление вертикальной составляющей тяги.
Причем, это последнее является наиболее эффективным средством, т. к. позволяет уменьшить величину подъемной силы самолета, необходимой для его отрыва от земли. Чем больше вертикальная составляющая тяги силовой установки, тем меньше должна быть подъемная сила крыла при отрыве. Так как она, при заданном значении коэффициента подъемной силы крыла Су, пропорциональна квадрату скорости движения, то скорость отрыва при величине вертикальной составляющей, равной половине веса самолета, уменьшается в 1,4 раза. Большая тяговооруженность СКВП позволит ему разгоняться при взлете с большим ускорением, что еще больше сократит длину разбега.

Однако широкому развитию СКВП препятствует присущие им проблемы, связанные с неприемлемым нарушением их продольной балансировки, вызываемым поворотом вектора тяги двигателей относительно центра тяжести (ЦТ) самолета. Поэтому, поворот вектора тяги двигателей, для уменьшения взлетно-посадочных скоростей, в настоящее время, применяется вблизи центра тяжести, в основном в боевой и военно-транспортной авиации у самолетов, имеющих узкий, 3 - 5% средней аэродинамической хорды (САХ), диапазон центровок. Здесь, возникающая при повороте вектора тяги двигателей продольная разбалансировка самолета, относительно легко, компенсируется аэродинамическими рулями. В этом качестве, наиболее известен конвертоплан Bell V-22 Osprey (США), испытания которого проходили тяжело и долго, сопровождались катастрофами, в которых погибло много людей.
По этим причинам, для самолетов гражданской авиации (ГА), имеющих диапазон эксплуатационных центровок, превышающий 15 – 20% САХ, поворот вектора тяги двигателей, пока не нашел применения.
Дело в том, что при крайних значениях ЦТ самолетов ГА, площадь их хвостового горизонтального оперения, стабилизатора, необходимая для компенсации моментов силы поворачивающегося вектора тяги, может превысить площадь основного крыла.
Эта проблема может быть разрешена путем синхронного и эквивалентного перемещения ЦТ самолета, одновременно с процессом поворота вектора тяги двигателей.

В настоящей работе исследована эффективность перемещения ЦТ самолета, с использованием веса его двигателей, которые, одновременно с поворотом относительно их поперечной оси, перемещаются вперед и, соответственно, перемещают вперед и ЦТ всего самолета. В процессе этого перемещения, плечи моментов сил тяги двигателей относительно ЦТ меняются таким образом, что продольная балансировка самолета сохраняется в заданных пределах.
Для исследования выбран самолет с двумя турбореактивными двигателями и полным полетным весом 50 т., типичным для полетов на короткие и средние расстояния.
Двигатели самолета, тягой 9 500 кг. каждый, размещены под крылом, на пилонах. Их вес и параметры аналогичны двигателям РД-3м-500, используемых на самолетах Ту-104.
Вес двигателей (РД-3м-500):
Gдв = 2 • 2850 = 5700 кг.
Вес гондолы двигателя на пилоне подвески [7]:
Gгонд = 0,02 Gдв = 0,02 • 2850 = 57 кг.
Вес пилона [7]:
Gпил = 0,18 Gдв = 0,18 • 2850 = 512 кг.
Вес топливной системы [7]:
Gт.с.= kт.с• •G0
где коэффициент К т.с. = 0,01 ÷ 0,013;
= Gтопл / Gс-та (т. е. Gтопл = 20 т, что при часовом расходе 2-х ТРД РД-3м-500 G час = 5140 кг/час обеспечивает полет самолета в перегоночном варианте в течение t = 20/5,14 = 3,9 час, на расстояние Sтех = 3,9 • 950 = 3700 км, без аэронавигационного запаса).
Gт.с. = 0,011 • 0,4 • 50000 = 220 кг.
На основании сделанных расчетов и данных статистики, составлена весовая ведомость для уточнения веса самолета.
Вес пустого самолета 24944 49%
Полный вес самолета 50000 100%
Выбор величины угла поворота вектора тяги и процедура взлета.
Исследования, проведенные в соответствующей литературе, показывают, что при расчетном значении тяговооруженности
μ = P / G = 19000/50000 = 0,38
наименьшую длину разбега можно получить при некотором оптимальном угле отклонения силы тяги, определяемом соотношением [11]:
sin φопрт = P/G = μ [11]
Для выбранного СКВП, при максимальном взлетном весе:
sin φопрт = 19000/50000 = 0,38
Рассматриваемый самолет будет эксплуатироваться и с меньшими взлетными весами, в диапазоне тяговооруженностей µ = 0,38 ÷ 0,6
Примем µ = 0,5 за расчетный, т. е. соответствующий φ расчетному = 30°
В [2] приводятся расчеты длины разбега самолета при различных значениях углов φ и тяговооруженностях µ, по которым построены графики зависимости Lразб. = f (µ, φ).
На их основании сделан вывод, что наивыгоднейшим углом φ наклона вектора тяги при µ = 0,3 ÷ 0,6 является угол φ ≈ 30°
На этот угол рекомендуется поворачивать вектор тяги двигателей на разбеге для взлета по достижении скорости 0,7 ÷ 0,75 от скорости отрыва [2].
Учитывая эти и другие соображения, за оптимальный угол поворота двигателей здесь приняты φдв = 30° и следующая процедура взлета.
Разбег СКВП, до скорости 0,7 – 0,75 от скорости отрыва, выполняется по самолетному, направив тягу маршевых двигателей СКВП под углом 0 – 12 градусов к горизонту, (т. е. не поворачивая двигатели относительно поперечной оси самолета Z), затем вектор тяги двигателей поворачивается на расчетный угол, оптимальный для данной тяговооруженности (в нашем случае, на угол φ = 300), после чего самолет отрывается от земли, с последующим разгоном скорости полета и набором высоты.
После набора СКВП установленной, безопасной высоты полета 120 м, его двигатели переводятся в маршевое положение на угол φ = 00, самолет разгоняется до скорости, безопасной для полета с убранной механизацией крыла. После ее достижения, механизация крыла убирается в полетное, крейсерское положение, двигатели переводятся на номинальный, а затем на крейсерский режим работы и дальнейший полет выполняется в обычном для самолета порядке.
Весовой и балансировочный расчет СКВП.
В работе было подобрано оптимальное расстояние смещения вперед двигателей СКВП, в процессе их поворота на расчетный угол φ = 00, проведен весовой и балансировочный расчет при различных конфигурациях, на основании которого составлена Таблица весов и их моментов относительно ЦТ СКВП по горизонтали и вертикали.
Полученные результаты показали незначительный разброс значений балансировочных данных СКВП при выпуске – уборке шасси и повороте двигателей, которые легко парируются отклонением его аэродинамических рулей.
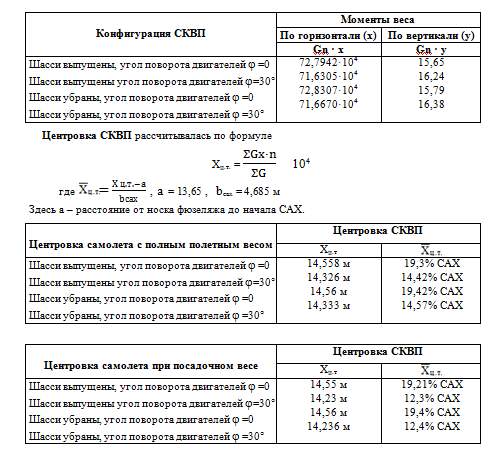
Расстояние между крайним задним положением координаты центра тяжести, ЦТ, и плоскостью установки главных опор шасси
L = Xt – Xгл.шасси = 0,6 м
т. е. главные опоры шасси расположены позади ЦТ, что гарантирует от опускания на хвост самолет, при предельно задней центровке.
База шасси
b = 15,6 – 4,84 = 10,76 м
Параметр
e / b = 0,6 / 10,76 = 0,055
и находится в рекомендованных [6] пределах e / b = (0,04 ÷ 0,15).
Смещение ЦТ учитывается в дальнейшем, при расчете устойчивости и управляемости СКВП
Анализ аэродинамических характеристик СКВП.
После определения, расчетным путем, основных аэродинамических параметров СКВП, были построены графические кривые зависимости этих параметров от положения вектора тяги двигателей в различных конфигурациях механизации крыла, шасси, с учетом влияния земли и вдали от нее.
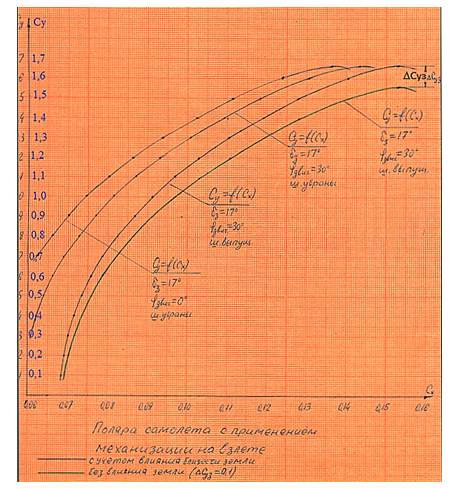
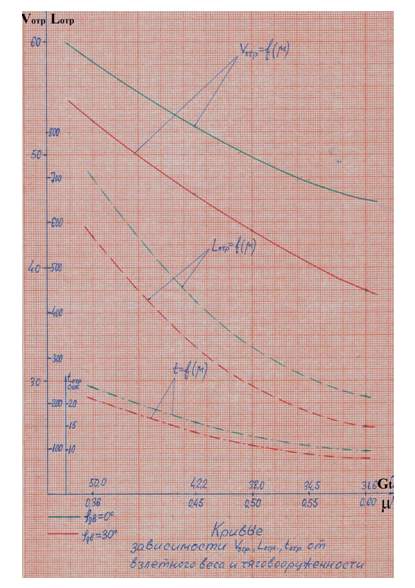
Как это следует из анализа поляры СКВП и кривых зависимости скорости отрыва Vотр, длины и времени разбега до отрыва Lотр и tотр, при повороте вектора тяги двигателей на угол φ=30°:
- Скорость отрыва Vотр уменьшается более, чем на 10%,
- Длина разбега Lотр сокращается более, чем на 20%
- Время разбега tотр сокращается более, чем на 10%.
Продольная балансировка СКВП.
У рассматриваемого самолета продольные оси двигателей не проходят через его ЦТ и развиваемая двигателями тяга создает относительно ЦТ момент mzp. Кроме того, при косой обдувке воздухозаборника ТРД возникает поперечная сила, которая в свою очередь создает некоторый момент mzp1.
Были проведен расчеты и анализ сил и моментов, действующих при взлете СКВП и на их основе построены балансировочные кривые СКВП при отклонении и без отклонения вектора тяги двигателей.
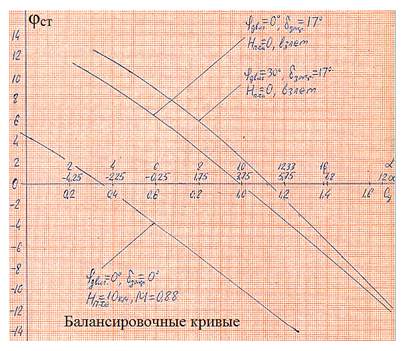
Построены также кривые mz= f(Cy, φст) моментов сил относительно поперечной оси Z СКВП при маршевом, φдв = 00 и взлетном, φдв = 300 положении двигателей, с закрылками отклоненными на углы δ =170 и δ =00 и при различных углах отклонения хвостового горизонтального оперения (стабилизатора) φст
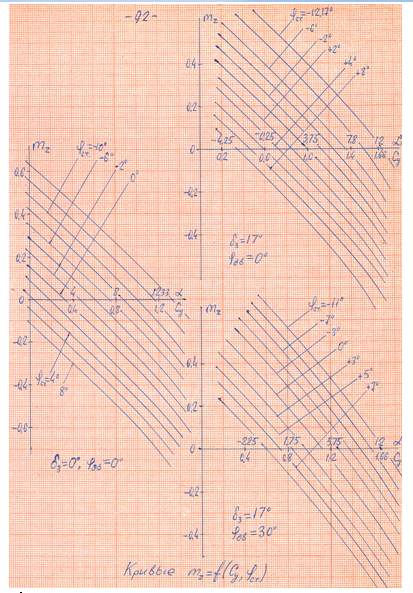
Характер протекания кривых φст.= f(Cy), (φст. убывает с ростом Cy), говорит о достаточной устойчивости самолета.
Продольная балансировка самолета осуществляется в полете поворотом стабилизатора на углы φст. от +80 до -140, при этом действительные углы атаки αго горизонтального оперения не превышают 70, чем обеспечивается его безотрывное обтекание и эффективность.
Выводы.
Поворот двигателей с их одновременным перемещением вперед, смещает центр тяжести ЦТ СКВП вперед на 6% ÷ 8%, что обеспечивает сохранение его продольной балансировки, т. к. при этом уменьшается плечо дестабилизирующей силы тяги двигателей и, одновременно, увеличиваются плечи горизонтального оперения и подъемной силы крыла.
При этом скорость отрыва СКВП от земли на взлете уменьшается более, чем на 10%, длина разбега сокращается более, чем на 20%, а время разбега сокращается более, чем на 10%., что делает проект СКВП с поворотом вектора тяги двигателей привлекательным и перспективным.
При увеличении тяговооруженности СКВП, возможно увеличить углы поворота двигателей и еще более улучшить его взлетно-посадочные характеристики.
Система управления поворотом вектора тяги двигателей СКВП.
Описание конструкции системы поворота двигателей.
Двигатели, заключенные в мотогондолы, подвешены на пилонах под крылом самолета с помощью стержней с демпферами, конструктивно аналогичных применяемым на современных самолетах. Длина стержней может регулироваться.
Каждый двигатель крепится в 2-х поясах, расположенных впереди и позади его центра тяжести, ЦТ. Передний пояс, находящийся ближе к ЦТ двигателя, является основным.
Узлы крепления двигателя обеспечивают возможность поворота его продольной оси на угол до 300 к горизонту (поперечной оси самолета Z).
Самолетные узлы крепятся к лонжеронам крыла.
К заднему поясу подвески двигателя крепится гидропривод, создающий необходимые усилия при повороте двигателя и фиксирующий его в крайних положениях с помощью специальных замков. При выпускании штока цилиндра гидропривода, двигатель поворачивается на угол 300 и одновременно несколько смещается вперед. При втягивании штока, двигатель становится в маршевое положение (параллельно продольной оси самолета).
Пилоны крепятся к конструкции крыла и служат обтекателями системы подвески двигателей. Передние части пилонов срезаны на угол и прикреплены к гондолам двигателей. При повороте двигателей, они перемещаются вместе с гондолами вперед и вверх.
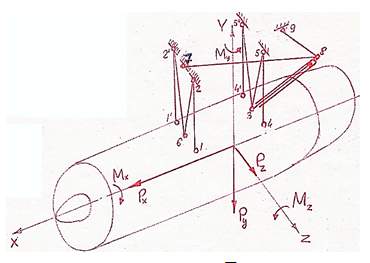
Тяга двигателя Px полностью воспринимается гидродвигателем в узле 3 и через ферму 7 – 8 – 9 передается на крыло.
Сила Pz распределяется по правилу рычага между узлами 3 и 6, нагружая стержни 2 – 6, 21 – 61, 3 – 5, 31 - 51.
Сила Py распределяется по правилу рычага между стержнями 1 – 2, 11 – 21 и стержнями 4 – 5, 41 - 51.
Момент силы Mx, действующий относительно оси X, полностью воспринимается стержнями 1 – 2, 11 - 21.
Момент My, действующий относительно оси Y, полностью воспринимается боковыми силами в узлах 3 и 6.
Момент Mz, действующий относительно лси Z, воспринимается парой сил, создаваемой усилиями стержней 1 – 2, 11 – 21, 4 – 5, 41 – 51.
Кинематическая схема поворота двигателей.
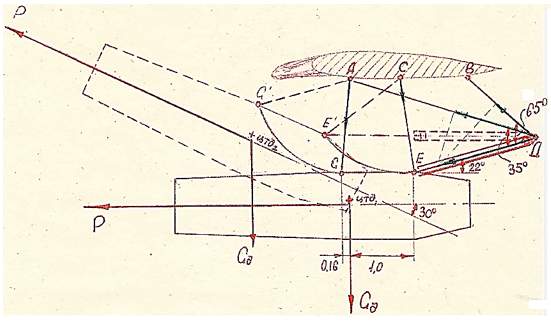
Как видно из приведенной схемы, поворот двигателя вверх на угол φ0дв = 300 происходит за счет тяги самого двигателя. При этом на гидродвигатель действует отрицательная нагрузка и он демпфирует систему, обеспечивает ее поворот с заданной скоростью и фиксирует, с помощью гидрозамков, двигатель в заданном, взлетном положении.
Поворот двигателя в маршевое положение, φ0дв = 00, осуществляется при подаче рабочей жидкости в левую полость цилиндра гтдродвигателя и перемещении его штока вправо. В этом положении двигатель фиксируется также с помощью гидрозамка.
Стержни подвески двигателя и гидродвигатель работают на растяжение, а ферма АБД крепления цилиндра гидродвигателя, на сжатие.
Так как в крайнем верхнем положении и в процессе поворота двигателя вертикальная составляющая его тяги частично уравновешивается весом самого двигателя, то максимальная нагрузка на систему будет действовать при маршевом положении двигателя и его работе во взлетном режиме.
Поскольку стержни подвески воспринимают только действие веса и массовых сил, тяга двигателя, здесь, полностью воспринимается гидродвигателем и передается от него, через ферму и узлы ее крепления, на конструкцию крыла. При этом, очевидно, оказываются наиболее нагруженными стержень АД фермы и узел А.
Далее, в работе проведен обычный прочностной расчет всех элементов конструкции системы поворота двигателей, который здесь опускается.
Длину гидродвигателя и другие его геометрические размеры, принимаем конструктивно, исходя из потребного хода штока.
Гидравлическая схема системы поворота двигателей.
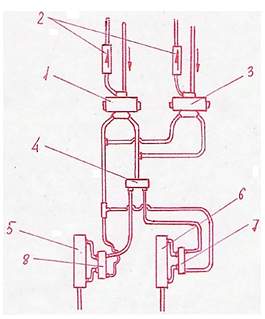
1. Электромагнитный кран ГА -142;
2. Обратные клапаны;
3. Аварийный электромагнитный кран ГА -142;
4. Гидравлический синхронизатор;
5, 6. Силовые цилиндры;
7, 8. Гидравлические замки.
Система питается от общей гидросистемы самолета с рабочим давление 220 кг/см2.
В нее входят: электромагнитный кран ГА -142, который в зависимости от положения электропереключателя в кабине пилотов ППН-42, сообщает ту, или иную полость гидроцилиндров с магистралями давления или слива системы.
Это приводит к повороту двигателей во взлетное, или маршевое положение.
Для обеспечения синхронности их движения, служит гидравлический синхронизатор (порционер) ГА – 142 / 1.
Его работа основана на принципе изменения потерь давления, в зависимости от изменения расхода через дроссель (диафрагму). При изменении в синхронности поворота двигателей, происходит изменение расходов жидкости в соответствующих гидродвигателх. Это вызывает смещение золотника порционера, который, перекрывая соответствующие отверстия, восстанавливает равенство расходов и синхронность поворота двигателей.
Для повышения надежности системы, предусмотрено, при ее отказе, включение в работу аварийной системы, через отдельный кран ГА-142.
Электрическая схема управления системой поворота двигателей.
1. Автомат защиты сети АЗС;
2. Переключатель ППН-45 управления системой;
3. Реле ТКД-12ПД выключения системы в крайних положениях двигателей;
4. Лампы СЛГС-51 сигнализации крайних положений двигателей;
5. Концевые выключатели ДП-102; взлетного положения двигателей;
6. Концевые выключатели маршевого положения двигателей;
7. Электромагнитный кран ГА-142/1;
8. Аварийный электромагнитный кран ГА-142/1.
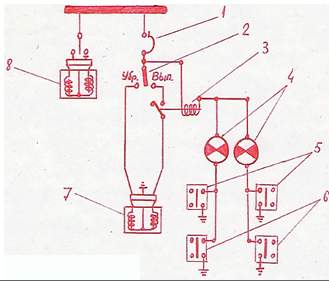
Для поворота двигателей во взлетное положение, переключатель ППН-45 ставится в положение «Вып». При этом подается электрическое напряжение на обмотку электромагнитного крана ГА-141/1, включающее его на подачу жидкости в силовой цилиндр, в полость поворота двигателей во взлетное положение.
При достижении двигателями заданного положения, срабатывают соответствующие концевые выключатели, от чего срабатывает реле ТКД-12ПД и обесточивает кран ГА-142/1. Подача жидкости прекращается. С прекращением циркуляции жидкости, гидравлические замки запирают ее в полостях цилиндров тем самым фиксируя двигатели во взлетном положении.
Одновременно, в кабине экипажа включается соответствующая световая сигнализация.
Поворот двигателей в маршевое положение осуществляется постановкой переключателя ППН-45 в положение «Убр». Порядок работы системы аналогичен.
Для повышения надежности системы, предусмотрен аварийный кран ГА-142/1, включаемый отдельно.
Вопросы технологии технического обслуживания системы поворота двигателей.
Техническое обслуживание самолетов (СКВП) проводится на основе регламентов, учитывающих все работы, выполнение которых повышает надежность эксплуатации материальной части, обеспечивает высокую исправность самолетов, сохраняет их основные сочленения от преждевременного износа.
Ее регламент технического обслуживания (ТО) предусматривает:
- оперативные виды ТО,
- периодические виды ТО,
- техобслуживание при кратковременной стоянке,
- послеполетное ТО,
- предполетное ТО,
и другие виды работ при смене двигателей, при тренировочных полетах и т. д.
Регламент ТО назначается по налету часов планером СКВП с начала эксплуатации, после последнего ремонта, или последнего профилактического ТО, причем, отсчет ведется от базовых цифр, кратных соответственно 50, 200, 600, 1200 часов, независимо от того, с каким допуском проводилось предыдущее периодическое ТО.
Дмитрий Атбашьян,
Тел. +37493 217 982
E-mail: skynav@mail.ru
Список используемой литературы:
[1]– Мхитарян А. М. – «Аэродинамика», М. 1970 г.
[2]– Курочкин Ф. П. – «Основы проектирования СВВП», М. 1970 г.
[3]– Павленко В. Ф. – «Самолеты вертикального взлета и посадки», М. 1966 г.
[4]– Лигум Т. И. – «Аэродинамика и динамика полета турбореактивных самолетов», М.1967г.
[5]- Бехтир П. Т.- «Аэродинамика самолета Ту-104», М. 1967г.
[6]- Егер С. М. – «Проектирование пассажирских самолетов», М. 1964 г.
[7]– Шейнин В. В. – «Весовая и транспортная эффективность пассажирских самолетов» - М. 1962 г.
[8]- Горощенко Б. Т. –«Аэродинамический расчет самолета», М. 1958 г.
[9]- Лазнюк П. С. и др. – «Аэродинамический расчет самолета», К. 1965 г.
[10]- Остословский И. В., Стражева И. В. – «Динамика полета», М. 1969 г.
[11] – Брага В. Г. и др. – «Практическая аэродинамика самолетов с ТРД», М. 1969 г.
[12]- Шульженко М. Н., Мостовой А. С.. – «Курс конструкции самолетов», М. 1965 г.
[13]- Лебедев А. А., Чернобровкин А. С. – «Динамика полета», М. 1962 г.
[14]- Остославский И. В., Калачев П. С. – «Продольная устойчивость и управляемость самолета», М. 1951 г.
[15]- Кан С. Н., Свердлов И. А. – «Расчет самолета на прочность», М. 1966 г.
[16]- Беляев и др., - «Краткий справочник машиностроителя», М. 1966 г.
[17]- Башта Т. М. – «Гидравлические приводы летательных аппаратов», М. 1967 г.
[18]- Мусаэлян А. А. – «Экономика гражданской авиации», М. 1965 г.
[19]- Парахонский и др. – «Основные вопросы экономики ГВФ», М. 1960 г.
[20]- Румянцева З. П. – «За лучшее использование фондов ГА», М. 1966 г.
[21]- Пугачев А. И. и др.- «Техническая эксплуатация» летательных аппаратов», М. 1969 г.
[22]- «Регламенты технического обслуживания самолетов Ту-104 и Ан-10»
|
|
 |
|
 |
|
|
|
|
|
 Проекты АТА
Проекты АТА
|
|
 |
|
 |
|
Центр Здоровья и Долголетия
Путеводитель по Армении
Негорючая электропроводка.
Эластичные чулки из быстро высыхающей гели с лечебными свойствами.
Создание на основе природных компонентов эффективного антикаогулянта, дешевого и без побочных явлений.
Инновационные проекты в области возобнавляемой энергетике.
Сигареты с лечебными свойствами.
|
|
|
|
|
|

